Nﺣ۳mﺣ۳ robotit suuntautuvat naapurinsa siluettien mukaan, jotka voivat nﺣ۳yttﺣ۳ﺣ۳ suuremmilta, pienemmiltﺣ۳ tai liikkuvat nﺣ۳kﺣﭘkentﺣ۳ssﺣ۳. Tﺣ۳mﺣ۳ tutkimus osoittaa, ettﺣ۳ robotit jﺣ۳ljittelevﺣ۳t tarkasti elﺣ۳imissﺣ۳ havaittuja kollektiivisia liikkeitﺣ۳.
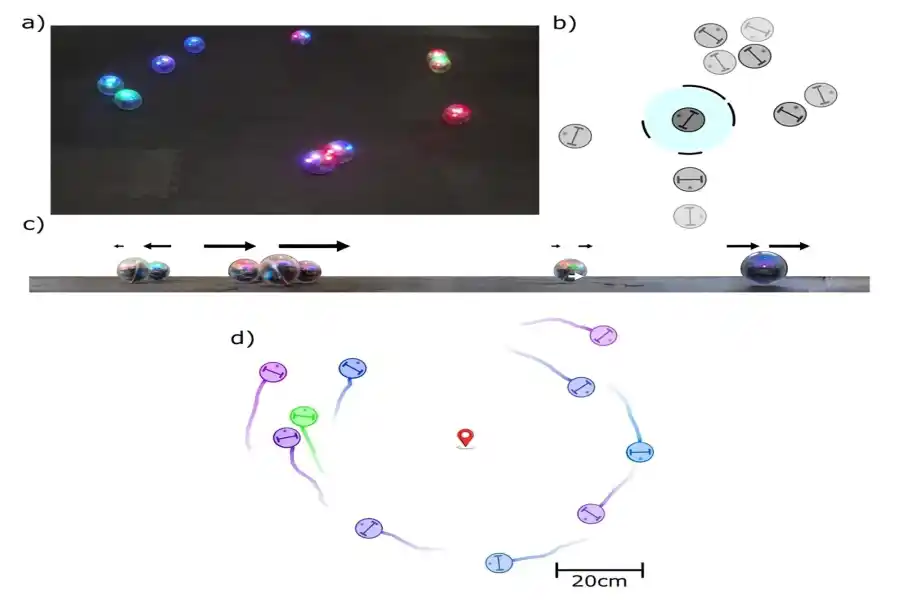
a) Kiertﺣ۳vﺣ۳ kollektiivinen liike toistuu pallomaisilla roboteilla.
b) Naapurisiilien ensisijainen nﺣ۳kemys emuloidaan jokaisessa robotissa.
c) Havaitut siilit voivat kasvaa, pienentyﺣ۳ tai kulkea nﺣ۳kﺣﭘkentﺣ۳ssﺣ۳.
d) Ankkurin lisﺣ۳ﺣ۳minen mahdollistaa robottien kollektiivisen liikkeen rajoittamisen rajattuun tilaan.
ﺡ۸ Castro, Eloy, Ruffier (Creative Commons Attribution 4.0)
b) Naapurisiilien ensisijainen nﺣ۳kemys emuloidaan jokaisessa robotissa.
c) Havaitut siilit voivat kasvaa, pienentyﺣ۳ tai kulkea nﺣ۳kﺣﭘkentﺣ۳ssﺣ۳.
d) Ankkurin lisﺣ۳ﺣ۳minen mahdollistaa robottien kollektiivisen liikkeen rajoittamisen rajattuun tilaan.
ﺡ۸ Castro, Eloy, Ruffier (Creative Commons Attribution 4.0)
Inspiroituminen elﺣ۳inten kollektiivisista liikkeistﺣ۳...
Kuvittele parvi lintuja lentﺣ۳mﺣ۳ssﺣ۳ taivaalla tai kalaparvi uiskentelemassa tﺣ۳ydellisessﺣ۳ harmoniassa. Nﺣ۳mﺣ۳ kiehtovat liikkeet, joita tiedemiehet ovat tutkinneet pitkﺣ۳ﺣ۳n, voidaan nyt jﺣ۳ljitellﺣ۳ simulaatioissa ja roboteilla, kﺣ۳yttﺣ۳en pelkﺣ۳stﺣ۳ﺣ۳n visuaalisia tietoja.
Nﺣ۳itﺣ۳ liikkeitﺣ۳ kutsutaan kollektiivisiksi liikkeiksi. Perinteisesti nﺣ۳itﺣ۳ liikkeitﺣ۳ on mallinnettu ottamatta huomioon biologista visuaalista jﺣ۳rjestelmﺣ۳ﺣ۳ (tai luonnollista nﺣ۳kﺣﭘﺣ۳) yksilﺣﭘiden osalta. Nﺣ۳in ollen suurin osa malleista perustuu naapurien vﺣ۳limatkan tuntemiseen, mikﺣ۳ ei ole elﺣ۳imille tyypillistﺣ۳.
... uuden mallin luomiseksi...
Artikkelissa, joka julkaistiin Bioinspiration & Biomimetics -lehdessﺣ۳, tiedemiehet ovat kehittﺣ۳neet uuden mallin. Se ei perustu keinotekoisiin etﺣ۳isyysmittauksiin, vaan kﺣ۳yttﺣ۳ﺣ۳, kuten elﺣ۳imet tekevﺣ۳t, ensisijaisia visuaalisia vihjeitﺣ۳ neljﺣ۳n sﺣ۳ﺣ۳nnﺣﭘn soveltamiseksi, joita kaikki ryhmﺣ۳n jﺣ۳senet noudattavat itsenﺣ۳isesti.
Tﺣ۳mﺣ۳ malli olettaa, ettﺣ۳ jokainen yksilﺣﭘ nﺣ۳kee vain muiden muodostamat siluetit, ilman ettﺣ۳ tunnistaa itse yksilﺣﭘitﺣ۳. Ne esitetﺣ۳ﺣ۳n siluettina jokaisen yksilﺣﭘn nﺣ۳kﺣﭘkentﺣ۳ssﺣ۳, luoden siten ensisijaisia visuaalisia vihjeitﺣ۳, kun siluetit liikkuvat.
Neljﺣ۳n sﺣ۳ﺣ۳ntﺣﭘ ovat seuraavat:
- Vetovoima: tﺣ۳mﺣ۳ sﺣ۳ﺣ۳ntﺣﭘ edustaa ryhmﺣ۳n luonnollista halua pysyﺣ۳ yhdessﺣ۳. Ilman vetovoimaa yksilﺣﭘt etﺣ۳ﺣ۳ntyisivﺣ۳t toisistaan. Sﺣ۳ﺣ۳ntﺣﭘ toteutuu ottaen huomioon jokaisen siluetin optisen koon.
- Suuntautuminen: tﺣ۳mﺣ۳ sﺣ۳ﺣ۳ntﺣﭘ heijastaa ryhmﺣ۳n taipumusta liikkua samaan suuntaan. Ilman suuntautumista yksilﺣﭘillﺣ۳ olisi vaikeuksia pysyﺣ۳ ryhmﺣ۳n mukana. Se toimii mittaamalla niin kutsuttua "optista virtausta", joka kuvaa visuaalista kulkua yksilﺣﭘn ympﺣ۳rillﺣ۳.
- Vﺣ۳ltteleminen: tﺣ۳mﺣ۳ sﺣ۳ﺣ۳ntﺣﭘ, joka on otettu kﺣ۳yttﺣﭘﺣﭘn estﺣ۳mﺣ۳ﺣ۳n robottien vﺣ۳lisiﺣ۳ tﺣﭘrmﺣ۳yksiﺣ۳, heijastaa yksilﺣﭘn taipumusta vﺣ۳lttﺣ۳ﺣ۳ lﺣ۳heisiﺣ۳ robotteja. Se toteutuu muuttamalla vetovoimaa jokaisen siluetin optisen koon kynnyksen mukaan.
- Ankkurointi: tﺣ۳mﺣ۳ sﺣ۳ﺣ۳ntﺣﭘ on lisﺣ۳tty, koska kﺣ۳ytettﺣ۳vissﺣ۳ oleva tila robottikokeelle on aina rajallinen. Se heijastaa ryhmien rajoittumista tiettyyn paikkaan. Tﺣ۳mﺣ۳ sﺣ۳ﺣ۳ntﺣﭘ toimii samankaltaisesti vetovoimasﺣ۳ﺣ۳nnﺣﭘn kanssa, mutta tietyssﺣ۳ virtuaalisesti mﺣ۳ﺣ۳ritellyssﺣ۳ paikassa.
Robottien toteutus tuo viivettﺣ۳ robotille lﺣ۳hetetyn kﺣ۳skyn ja sen liikkeen alkamisen vﺣ۳lille: tﺣ۳mﺣ۳ viive on myﺣﭘs otettu huomioon simulaatiossa, jotta se pysyisi vertailukelpoisena.
... edistﺣ۳ﺣ۳ autonomista robotiikkaa.
Nﺣ۳mﺣ۳ tyﺣﭘt kﺣ۳yttﺣ۳vﺣ۳t visuaalista mallia kollektiivisesta liikkeestﺣ۳ pallomaisilla roboteilla, joissa jokaisen robotin nﺣ۳kﺣﭘkyky on emuloitu. Nﺣ۳in robotit jﺣ۳ljittelevﺣ۳t nﺣ۳itﺣ۳ kollektiivisia kﺣ۳yttﺣ۳ytymisiﺣ۳ kymmenen itsenﺣ۳isen pallomaisen robotin ryhmﺣ۳ssﺣ۳. Tﺣ۳mﺣ۳ malli on myﺣﭘs auttanut kaventamaan kuilua simulaatioiden ja robottikokeiden vﺣ۳lillﺣ۳. Itse asiassa robottikokeilu tuo aina mukanaan epﺣ۳varmuuksia, joita on vaikea mallintaa tarkasti. Tﺣ۳ssﺣ۳ simuloidut ja robottikﺣ۳yttﺣ۳ytymiset ovat lﺣ۳hes identtisiﺣ۳, vaikka ne ohjataan tﺣ۳smﺣ۳lleen samalla visuaalisella mallilla.
Yhteenvetona voidaan todeta, ettﺣ۳ tﺣ۳mﺣ۳ minimaalinen visuaalinen malli kollektiivisesta liikkeestﺣ۳ riittﺣ۳ﺣ۳ useimpien kollektiivisten kﺣ۳yttﺣ۳ytymisten rekreointiin pallomaisilla roboteilla, jotka kﺣ۳yttﺣ۳ytyvﺣ۳t analogisesti digitaalisiin simulaatioihin. Tﺣ۳mﺣ۳ tyﺣﭘ merkitsee edistystﺣ۳ autonomiselle robotiikalle, ja sillﺣ۳ on potentiaalisia sovelluksia parvirobotiikassa, etsintﺣ۳- ja pelastustehtﺣ۳vissﺣ۳ sekﺣ۳ automatisoiduissa valvontajﺣ۳rjestelmissﺣ۳.